
Un
red Ad Hoc es un tipo descentralizado de la red móvil. La red es ad
hoc, ya que no se basa en una infraestructura pre existente, como los
routers de redes cableadas o puntos de acceso de redes inalámbricas. En
su lugar, cada nodo participa en el enrutamiento enviando datos de otros
nodos, por lo que la determinación de que nodos envían datos se
realizan dinámicamente sobre la base de la conectividad de red.
La frase "Ad Hoc" está en latín y significa "para este fin". Cada dispositivo en un red Ad Hoc es libre de moverse independientemente en cualquier dirección, y por lo tanto sus enlaces a otros dispositivos cambian con frecuencia.
La frase "Ad Hoc" está en latín y significa "para este fin". Cada dispositivo en un red Ad Hoc es libre de moverse independientemente en cualquier dirección, y por lo tanto sus enlaces a otros dispositivos cambian con frecuencia.
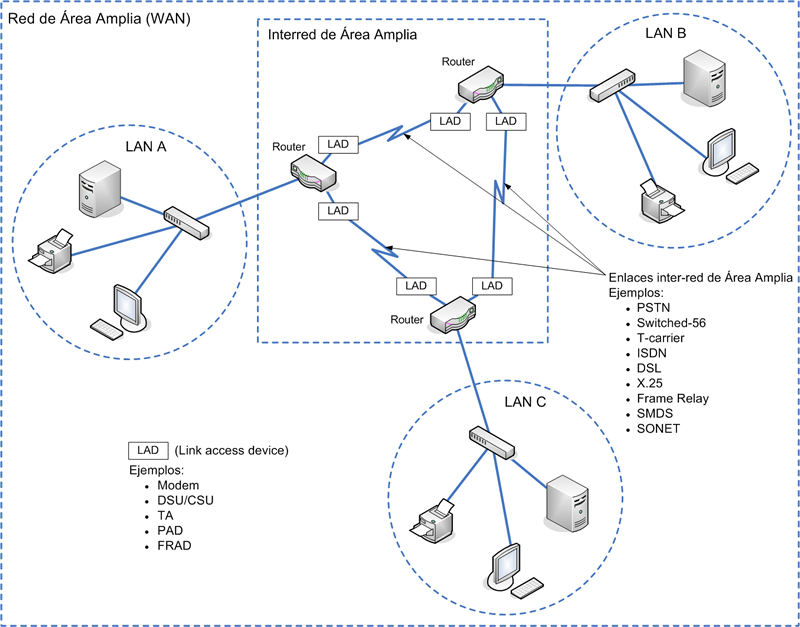
Una red de área amplia puede ser descripta como un grupo de
redes individuales conectadas a través de extensas distancias geográficas. Los
componentes de una red WAN típica incluyen:
La inter-red combinada con las LANs crea la WAN.
 Un dispositivo de acceso al enlace (LAD) es necesario para
convertir las señales para ser transmitidas desde la LAN en un formato
compatible con el tipo de enlace de área amplia inter-red utilizado.
Un dispositivo de acceso al enlace (LAD) es necesario para
convertir las señales para ser transmitidas desde la LAN en un formato
compatible con el tipo de enlace de área amplia inter-red utilizado.
Las conexiones entre LADs pueden ser punto a punto o a través de la red intermedia de un proveedor de servicios de red.
Nota: Una red intermedia se define como una red utilizada para conectar dos o más redes.
En un enlace punto a punto, los LADs se comunican directamente entre sí sobre un circuito de telecomunicaciones. Este circuito puede ser temporal, como el de una red conmutada de telefonía pública, o permanente, por ejemplo una línea de datos dedicada contratada a un proveedor.
Algunos ejemplos de LAD incluyen:
Los proveedores de servicio de red reciben múltiples flujos de datos en forma simultánea desde varias organizaciones. Todos los datos son transferidos un paquete a la vez por la red del proveedor de servicios, potencialmente con cada paquete tomando un camino diferente. El enrutamiento se basa en la información de direccionamiento incluida en el paquete.
Existen muchas conexiones y rutas posibles en la topología en forma de malla de la red del proveedor. Varias tecnologías de enrutamiento y conmutación a alta velocidad son utilizadas por el proveedor de servicios de red para dirigir los paquetes hasta su destino. Dado que existen múltiples caminos, un paquete puede ser enrutado para evitar cualquier falla o área congestionada de la red, el enrutamiento del paquete es dinámico.
Cuando se usan las redes de alta velocidad de un proveedor de servicos de red como enlaces de red intermedios, no existe un circuito predefinido de extremo a extremo entre las LAN comunicadas; es por ello que las tasas de transmisión de la inter-red pueden ser aumentadas o disminuidas según se requiera mediante acuerdos con el proveedor de servicios de red.
Internet es la red intermedia global más grande. Otros ejemplos incluyen redes satelitales y de relevo de tramas (Frame Relay).
- Dos o más redes de área local (LANs) independientes.
- Routers conectados a cada LAN
- Dispositivos de acceso al enlace (Link access devices, LADs) conectados a cada router.
- Enlaces inter-red de área amplia conectados a cada LAD
La inter-red combinada con las LANs crea la WAN.
Las conexiones entre LADs pueden ser punto a punto o a través de la red intermedia de un proveedor de servicios de red.
Nota: Una red intermedia se define como una red utilizada para conectar dos o más redes.
En un enlace punto a punto, los LADs se comunican directamente entre sí sobre un circuito de telecomunicaciones. Este circuito puede ser temporal, como el de una red conmutada de telefonía pública, o permanente, por ejemplo una línea de datos dedicada contratada a un proveedor.
Algunos ejemplos de LAD incluyen:
- Modem.
- Data service unit/channel service unit (DSU/CSU).
- Terminal adapter (TA).
- Packet assembler/disassembler (PAD).
- Frame Relay access device (FRAD).
Los proveedores de servicio de red reciben múltiples flujos de datos en forma simultánea desde varias organizaciones. Todos los datos son transferidos un paquete a la vez por la red del proveedor de servicios, potencialmente con cada paquete tomando un camino diferente. El enrutamiento se basa en la información de direccionamiento incluida en el paquete.
Existen muchas conexiones y rutas posibles en la topología en forma de malla de la red del proveedor. Varias tecnologías de enrutamiento y conmutación a alta velocidad son utilizadas por el proveedor de servicios de red para dirigir los paquetes hasta su destino. Dado que existen múltiples caminos, un paquete puede ser enrutado para evitar cualquier falla o área congestionada de la red, el enrutamiento del paquete es dinámico.
Cuando se usan las redes de alta velocidad de un proveedor de servicos de red como enlaces de red intermedios, no existe un circuito predefinido de extremo a extremo entre las LAN comunicadas; es por ello que las tasas de transmisión de la inter-red pueden ser aumentadas o disminuidas según se requiera mediante acuerdos con el proveedor de servicios de red.
Internet es la red intermedia global más grande. Otros ejemplos incluyen redes satelitales y de relevo de tramas (Frame Relay).
La comunicación en los medios informáticos se realiza de dos maneras
Este tipo de transmisión tiene lugar en el interior de una maquina o entre maquinas cuando la distancia es muy corta. La principal ventaja de esto modo de transmitir datos es la velocidad de transmisión y la mayor desventaja es el costo.
También puede llegar a considerarse una transmisión en paralelo, aunque se realice sobre una sola línea, al caso de multiplexación de datos, donde los diferentes datos se encuentran intercalados durante la transmisión.

Transmisión en paralelo

Transmisión en serie
A la salida de una maquina los datos en paralelo se convierten los datos
en serie, los mismos se transmiten y luego en el receptor tiene lugar el
proceso inverso, volviéndose a obtener los datos en paralelo. La secuencia
de bits transmitidos es por orden de peso creciente y generalmente el último
bit es de paridad.
In aspecto fundamental de la transmisión serie es el sincronismo, entendiéndose como tal al procedimiento mediante el cual transmisor y receptor reconocen los ceros y unos de los bits de igual forma.
El sincronismo puede tenerse a nivel de bit, de byte o de bloque, donde en cada caso se identifica el inicio y finalización de los mismos.
Dentro de la transmisión serie existen dos formas:

Formato de un carácter
Generalmente cuando no hay transmisión, una línea se encuentra en un nivel
alto. Tanto el transmisor como el receptor, saben cual es la cantidad de
bits que componen el carácter (en el ejemplo son 7).
Los bits de parada son una manera de fijar qué delimita la cantidad de bits del carácter y cuando e transmite un conjunto de caracteres, luego de los bits de parada existe un bit de arranque entre los distintos caracteres.
A pesar de ser una forma comúnmente utilizada, la desventaja de la transmisión asincrónica es su bajo rendimiento, puesto que como en el caso del ejemplo, el carácter tiene 7 bits pero para efectuar la transmisión se requieren 10. O sea que del total de bits transmitidos solo el 70% pertenecen a datos.
Este método es más efectivo por que el flujo de información ocurre en forma uniforme, con lo cual es posible lograr velocidades de transmisión más altas.
Para lograr el sincronismo, el transmisor envía una señal de inicioi de transmisión mediante la cual se activa el clock del receptor. A partir de dicho instante transmisor y receptor se encuentran sincronizados.
Otra forma de lograr el sincronismo es mediante la utilización de códigos auto sincronizantes los cuales permiten identificar el inicio y el fin de cada bit.
Al canal de comunicación también se lo denomina vínculo o enlace.


Para el intercambio de datos entre computadores este tipo de comunicaciones son más eficientes que las transmisiones semi-duplex.
Paralelo
Todos los bits se transmiten simultáneamente, existiendo luego un tiempo antes de la transmisión del siguiente boque.Este tipo de transmisión tiene lugar en el interior de una maquina o entre maquinas cuando la distancia es muy corta. La principal ventaja de esto modo de transmitir datos es la velocidad de transmisión y la mayor desventaja es el costo.
También puede llegar a considerarse una transmisión en paralelo, aunque se realice sobre una sola línea, al caso de multiplexación de datos, donde los diferentes datos se encuentran intercalados durante la transmisión.
Transmisión en paralelo
Serie
En este caso los n bits que componen un mensaje se transmiten uno detrás de otro por la misma línea.Transmisión en serie
In aspecto fundamental de la transmisión serie es el sincronismo, entendiéndose como tal al procedimiento mediante el cual transmisor y receptor reconocen los ceros y unos de los bits de igual forma.
El sincronismo puede tenerse a nivel de bit, de byte o de bloque, donde en cada caso se identifica el inicio y finalización de los mismos.
Dentro de la transmisión serie existen dos formas:
Transmisión asincrónica
Es también conocida como Stara/stop. Requiere de una señal que identifique el inicio del carácter y a la misma se la denomina bit de arranque. También se requiere de otra señal denominada señal de parada que indica la finalización del carácter o bloque.Formato de un carácter
Los bits de parada son una manera de fijar qué delimita la cantidad de bits del carácter y cuando e transmite un conjunto de caracteres, luego de los bits de parada existe un bit de arranque entre los distintos caracteres.
A pesar de ser una forma comúnmente utilizada, la desventaja de la transmisión asincrónica es su bajo rendimiento, puesto que como en el caso del ejemplo, el carácter tiene 7 bits pero para efectuar la transmisión se requieren 10. O sea que del total de bits transmitidos solo el 70% pertenecen a datos.
Transmisión sincrónica
En este tipo de transmisión es necesario que el transmisor y el receptor utilicen la misma frecuencia de clock en ese caso la transmisión se efectúa en bloques, debiéndose definir dos grupos de bits denominados delimitadores, mediante los cuales se indica el inicio y el fin de cada bloque.Este método es más efectivo por que el flujo de información ocurre en forma uniforme, con lo cual es posible lograr velocidades de transmisión más altas.
Para lograr el sincronismo, el transmisor envía una señal de inicioi de transmisión mediante la cual se activa el clock del receptor. A partir de dicho instante transmisor y receptor se encuentran sincronizados.
Otra forma de lograr el sincronismo es mediante la utilización de códigos auto sincronizantes los cuales permiten identificar el inicio y el fin de cada bit.
Canal de Comunicación
Se denomina así al recurso físico que hay que establecer entre varios medios de transmisión para establecer la comunicación.Al canal de comunicación también se lo denomina vínculo o enlace.
Tipos de comunicación
En los canales de comunicación existen tres tipos de transmisión.Simplex
En este caso el transmisor y el receptor están perfectamente definidos y la comunicación es unidireccional. Este tipo de comunicaciones se emplean usualmente en redes de radiodifusión, donde los receptores no necesitan enviar ningún tipo de dato al transmisor.Duplex o Semi-duplex
En este caso ambos extremos del sistema de comunicación cumplen funciones de transmisor y receptor y los datos se desplazan en ambos sentidos pero no simultáneamente. Este tipo de comunicación se utiliza habitualmente en la interacción entre terminales y un computador central.Full Duplex
El sistema es similar al duplex, pero los datos se desplazan en ambos sentidos simultáneamente. Para ello ambos transmisores poseen diferentes frecuencias de transmisión o dos caminos de comunicación separados, mientras que la comunicación semi-duplex necesita normalmente uno solo.Para el intercambio de datos entre computadores este tipo de comunicaciones son más eficientes que las transmisiones semi-duplex.
Hay tres tipos de perturbaciones

Cuanto más alta sea la relación anterior mejor calidad tendrá la transmisión.
Las señales de ruido tienen determinadas frecuencias que dependen de los dispositivos eléctricos del sistema. Cuando las señales de ruido abarcan todo el espectro de frecuencias se denomina ruido blanco.
Según su origen se puede clasificar al ruido en las siguientes categorías:
El ruido de intermodulación se produce cuando existe alguna "no linealidad" en el transmisor, receptor o en el sistema de transmisión. Estos sistemas, normalmente, se comportan como sistemas lineales, es decir, la salida es igual a la entrada multiplicada por un valor constante. En cambio en los sistemas no constantes la salida es una función más compleja de la entrada. Estas componentes pueden aparecer a causa de de un funcionamiento incorrecto de los sistemas o por el uso de excesiva energía en la señal.


Esta velocidad está dada por la velocidad de cambio de la señal y por lo tanto dependerá del esquema de codificación elegido.
La velocidad de transmisión esta dada por:

Donde ni es la cantidad de niveles del canal i-ésimo que transmite en paralelo; siendo por lo tanto n la cantidad de canales.
 es la velocidad de
modulación del i-ésimo canal.
es la velocidad de
modulación del i-ésimo canal.
Si tenemos un solo canal y trabajando con dos niveles como sucede con el sistema binario, la velocidad de transmisión resulta

La unidad de medida de la velocidad de transmisión es bits/segundo.
Si se tiene un sistema multinivel, se puede incrementar la velocidad de transmisión sin cambiar la velocidad de modulación.
Por ejemplo:
Si ni = 4

Si ni = 8

Si tenemos dos bits, las posibles combinaciones serán:
Si establecemos un nivel para cada combinación obtendremos una señal multinivel
 Si aplicamos lo anterior a una secuencia binaria la señal que se transmite
tendrá la siguiente forma
Si aplicamos lo anterior a una secuencia binaria la señal que se transmite
tendrá la siguiente forma
Secuencia binaria: 101101001001
 La señal anterior, si bien posee la misma velocidad de modulación que una
señal binaria tiene mayor velocidad de transmisión puesto que cada nivel
significa la transmisión de 2 bits (dibit).
La señal anterior, si bien posee la misma velocidad de modulación que una
señal binaria tiene mayor velocidad de transmisión puesto que cada nivel
significa la transmisión de 2 bits (dibit).
El concepto de velocidad de modulación se emplea en transmisiones sincrónicas, puesto que en transmisiones asincrónicas carece de sentido ya que no se tiene en cuenta la duración de los bits de arranque y parada.

De acuerdo al desarrollo de Fourier, por ser la señal cuadrada, solo tendremos armónicas impares y si aceptamos una deformación que permita despreciar a las señales más allá de la 5ª armónica, el ancho de banda necesario para transmitir dicha señal será:
BW = 5f – f = 4f
BW = 5MHz – 1MHz = 4MHz
Ahora bien, si consideramos que a dicha frecuencia estamos transmitiendo ceros y unos, el periodo resultara t = 1 ms, razón por la cual el tiempo de duración de cada bit será 0,5ms y ello implica una velocidad de modulación de 2MBaudios. Si consideramos que se trata de un solo canal y por ser la señal cuadrada tenemos 2 niveles, resulta que la velocidad de transmisión y la velocidad de modulación coinciden numéricamente, resultando la velocidad de transmisión VT = 2Mbits/seg.
Si ahora consideramos tener una señal cuya frecuencia es de 2MHz y aceptamos una distorsión, al igual que en e caso anterior, que permita despreciar a las señales más allá de la 5ª armónica, el ancho de banda resultará
f = 2MHz
BW = 5 – 2MHz – 2MHz =10 MHz – 2 MHz = 8MHz
En este caso la duración de cada bit es de 0,25 ms, por lo tanto, siguiendo el mismo razonamiento del caso anterior, la velocidad de transferencia resultara de 4Mbits/seg.
Si en un tercer análisis consideramos que la frecuencia de la señal es de 2MHz pero aceptamos una distorsión en la cual se desprecian las señales cuya frecuencia esté más alla de la tercera armónica, el ancho de banda resultara
f = 2MHz
BW = 3 – 2MHz – 2 MHz = 4MHz
y para la frecuencia dada la velocidad de transmisión es, igual que en el caso anterior, de 4 Mbits/seg.
Del análisis anterior podemos obtener las siguientes conclusiones
Si se tienen señales de más de dos niveles, es decir que cada elemento de las señales representa más de un bit, la fórmula de Nyquist resulta
C = 2 BW log2M
donde M es la cantidad de niveles.
Si existe ruido, la velocidad de transmisión debe disminuir pues se corre el riesgo de aumentar la taza de errores ya que mayor cantidad de bits pueden verse afectados en el mismo tiempo.
Solo es posible incrementar la velocidad de transmisión por medio de una transmisión multinivel.
Shannon estableció que la capacidad de un canal de comunicaciones esta dada por la siguiente expresión

La expresión de Shannon indica el máximo límite teórico que puede obtenerse y a dicha capacidad se la denomina capacidad libre. En forma práctica la capacidad de un canal es siempre menor que la capacidad libre.
- Ruido
- Distorsión
- Interferencia
Ruido
Son señales no deseadas que ingresan al sistema de comunicaciones y que no pueden evitarse. Generalmente se deben a las características eléctricas del sistema de comunicaciones o del medio a través del cual se transmite. Dichas señales producen variaciones en la amplitud de la señal de datos. Se define como relación señal/ruido y se expresa en decibeles a la relación entre la potencia de la señal y la potencia del ruido.Cuanto más alta sea la relación anterior mejor calidad tendrá la transmisión.
Las señales de ruido tienen determinadas frecuencias que dependen de los dispositivos eléctricos del sistema. Cuando las señales de ruido abarcan todo el espectro de frecuencias se denomina ruido blanco.
Según su origen se puede clasificar al ruido en las siguientes categorías:
- Ruido térmico
- Ruido de intermodulación
- Ruido impulsivo
Ruido Térmico
Se debe a la agitación térmica de los electrones dentro del conductor y es función de la temperatura. Este tipo de ruido se encuentra presente en todos los dispositivos electrónicos y medios de transmisión. El ruido térmico no se puede eliminar por lo que representa un límite superior a las prestaciones que pueden alcanzarse con los sistemas de comunicaciones.Ruido de Intermodulación
Cuando señales de diferentes frecuencias comparten un mismo medio de transmisión puede producirse un ruido de intermodulación. Este tipo de ruido genera señales a frecuencias que son suma o diferencia de las dos frecuencias originales, o múltiplos de éstas. Por ejemplo si se tienen dos frecuencias f1 y f2 la mezcla de las mismas puede producir energías a frecuencias f1 + f2 y éstas frecuencias pueden interferir con una señal de frecuencia f1 + f2.El ruido de intermodulación se produce cuando existe alguna "no linealidad" en el transmisor, receptor o en el sistema de transmisión. Estos sistemas, normalmente, se comportan como sistemas lineales, es decir, la salida es igual a la entrada multiplicada por un valor constante. En cambio en los sistemas no constantes la salida es una función más compleja de la entrada. Estas componentes pueden aparecer a causa de de un funcionamiento incorrecto de los sistemas o por el uso de excesiva energía en la señal.
Ruido impulsivo
El ruido impulsivo es no continuo y está constituido por pulsos o picos irregulares de corta duración y amplitud relativamente grande, en contraste con los tipos de ruidos anteriores que son razonablemente predecibles y de magnitud constante. Estos pulsos se generan por diversas causas, por ejemplo son generados perturbaciones electromagnéticas exteriores producidas por tormentas atmosféricas o fallos y defectos en los sistemas de comunicación.Distorsión
Es una perturbación que produce la deformación de la señal en un sistema de comunicaciones. Dado que por las características físicas el sistema de comunicaciones está restringido a determinadas frecuencias y recordando el desarrollo de Fourier resulta que la distorsión estará dada por la falta de las señales de frecuencias no aceptadas por el sistema de comunicaciones.Interferencia
Dicha perturbación es debida a señales provenientes de otras transmisiones, las cuales debido a la proximidad de las frecuencias se mezclan con las de la señal que se transmite.Velocidad de modulación
Se define como la inversa del tiempo más corto entre dos instantes significativos de la señal.Esta velocidad está dada por la velocidad de cambio de la señal y por lo tanto dependerá del esquema de codificación elegido.
Velocidad de transmisión
Está dada por la cantidad de bits que se transmiten por segundo independientemente de si los mismos contienen información o no.La velocidad de transmisión esta dada por:
Donde ni es la cantidad de niveles del canal i-ésimo que transmite en paralelo; siendo por lo tanto n la cantidad de canales.
Si tenemos un solo canal y trabajando con dos niveles como sucede con el sistema binario, la velocidad de transmisión resulta
La unidad de medida de la velocidad de transmisión es bits/segundo.
Si se tiene un sistema multinivel, se puede incrementar la velocidad de transmisión sin cambiar la velocidad de modulación.
Por ejemplo:
Si ni = 4
Si ni = 8
Si tenemos dos bits, las posibles combinaciones serán:
0
|
0
|
0
|
1
|
1
|
0
|
1
|
1
|
Secuencia binaria: 101101001001
El concepto de velocidad de modulación se emplea en transmisiones sincrónicas, puesto que en transmisiones asincrónicas carece de sentido ya que no se tiene en cuenta la duración de los bits de arranque y parada.
Velocidad de transferencia de datos
Está dad por la cantidad media de bits que se transmiten entre dos sistemas de datos.Velocidad real de transferencia de datos
Se denomina así a la cantidad de bits transmitidos en la unidad de tiempo, con la condición que el receptor los considere válidos.
VT > VTransf > VR.Transf
Relación entre el ancho de banda y la velocidad de transmisión
Si se tiene un sistema de comunicaciones a través del cual se transmiten datos binarios, señal cuadrada, y considerando que la frecuencia de dicha señal es de 1 MHz.De acuerdo al desarrollo de Fourier, por ser la señal cuadrada, solo tendremos armónicas impares y si aceptamos una deformación que permita despreciar a las señales más allá de la 5ª armónica, el ancho de banda necesario para transmitir dicha señal será:
BW = 5f – f = 4f
BW = 5MHz – 1MHz = 4MHz
Ahora bien, si consideramos que a dicha frecuencia estamos transmitiendo ceros y unos, el periodo resultara t = 1 ms, razón por la cual el tiempo de duración de cada bit será 0,5ms y ello implica una velocidad de modulación de 2MBaudios. Si consideramos que se trata de un solo canal y por ser la señal cuadrada tenemos 2 niveles, resulta que la velocidad de transmisión y la velocidad de modulación coinciden numéricamente, resultando la velocidad de transmisión VT = 2Mbits/seg.
Si ahora consideramos tener una señal cuya frecuencia es de 2MHz y aceptamos una distorsión, al igual que en e caso anterior, que permita despreciar a las señales más allá de la 5ª armónica, el ancho de banda resultará
f = 2MHz
BW = 5 – 2MHz – 2MHz =10 MHz – 2 MHz = 8MHz
En este caso la duración de cada bit es de 0,25 ms, por lo tanto, siguiendo el mismo razonamiento del caso anterior, la velocidad de transferencia resultara de 4Mbits/seg.
Si en un tercer análisis consideramos que la frecuencia de la señal es de 2MHz pero aceptamos una distorsión en la cual se desprecian las señales cuya frecuencia esté más alla de la tercera armónica, el ancho de banda resultara
f = 2MHz
BW = 3 – 2MHz – 2 MHz = 4MHz
y para la frecuencia dada la velocidad de transmisión es, igual que en el caso anterior, de 4 Mbits/seg.
Del análisis anterior podemos obtener las siguientes conclusiones
- Para transmitir una señal sin deformación se requiere un ancho de banda infinito.
- Todo medio de transmisión disminuye el ancho de banda, razón por la cual todas las señales sufren alguna deformación.
- Cuanto mayor es el ancho de banda mayor es la velocidad de transmisión que puede obtenerse.
- Cuanto mayor es la frecuencia de la señal, mayor es la velocidad de transmisión puesto que cada bit tiene un menor tiempo de duración y ello hace que sea posible enviar mayor cantidad de bits en el mismo tiempo.
Capacidad de un canal
Nyquist determinó que la máxima velocidad alcanzable para un ancho de banda dado es dos veces dicho ancho de banda si no existe ruido.Si se tienen señales de más de dos niveles, es decir que cada elemento de las señales representa más de un bit, la fórmula de Nyquist resulta
C = 2 BW log2M
donde M es la cantidad de niveles.
Si existe ruido, la velocidad de transmisión debe disminuir pues se corre el riesgo de aumentar la taza de errores ya que mayor cantidad de bits pueden verse afectados en el mismo tiempo.
Solo es posible incrementar la velocidad de transmisión por medio de una transmisión multinivel.
Capacidad de un canal con ruido
Teniendo en cuenta que el ruido es un parámetro fundamental y que el mismo se evalúa en potenciaShannon estableció que la capacidad de un canal de comunicaciones esta dada por la siguiente expresión
La expresión de Shannon indica el máximo límite teórico que puede obtenerse y a dicha capacidad se la denomina capacidad libre. En forma práctica la capacidad de un canal es siempre menor que la capacidad libre.
No hay comentarios:
Publicar un comentario